![]() Download von Listen und Stromlaufplänen meiner home made DIY Tennis Ball Maschinen und anderes
Download von Listen und Stromlaufplänen meiner home made DIY Tennis Ball Maschinen und anderes
|
Sonstiges |
Beschreibung |
Voraussetzungen/Hinweise |
|
März 2025 |
DIY Eigenbau Tennis-Ballmaschine mit drei Motoren zur Sidespin Kick- und
Slice-Aufschlagsimmulation YouTube  |
19.05.2025 Hier eine Webseite mit meinen bisherigen Ausdrucken, in Zahlen: 172 Teile, 19 kg Prusament und 436 Stunden Druckzeit: Printfiles 10.05.2025 Die Version 2 ist in Arbeit macht aber mehr Probleme als erwartet. Die Fertigstellung dauert also noch etwas.... Hauptgrund ist die komplett neue Ballvereinzelung. Die einzige Anforderung an die neue Ballvereinzelung ist: KEINE AUSFÄLLE und keine VERSTOPFUNG mehr!!! 20.03.2025 Natürlich hat die Maschine Kinderkrankheiten aber sie ist zu gebrauchen. |
|
Juli 2024 Warum neue Antriebe und Motoren? Immer wieder hatten die vorherigen Motoren, mit dem Auge nicht sichtbare Schrittverluste. Die genaue Ursache konnte ich nicht hunderprozentig ermitteln. Die Schrittverluste waren nur durch deren Auswirkung, nämlich bei Challenges durch Differenzen zwischen den Soll- und Istwerten bei Ballhöhe und Schwenkweite, spürbar. Und das auch nur auffallend bei längerer Benutzung von Challenges, zum Beispiel bei Stop, Lob Drive. Ab 27.08.2024 neuer Schwenkantrieb  |
Upgrade meiner mit dem
Raspberry Pi gesteuerten Ballmaschine YouTube  |
Test der
Ballhöhen- und Schwenkverstellung Die neuen Verstellungen haben kräftigere Schrittmotoren, stabilere Antriebe und nur noch einen Endschalter. Den Hinweis mit nur einem Endschalter habe ich von Artur Brauer schon vor Jahren bekommen. Ich habe aber erst jetzt begriffen wie ich das in Software umsetzen kann. Den mechanischen Schalter, der den Balldurchgang erkennen sollte, musste ich durch einen optoelektronischen Sensor ersetzen. |
| Juni 2024 |
Ein unübliches Video zu misslungenen Konstruktionen YouTube  |
Eventuell entlockt dieses Video dir die ein oder andere
Idee? Wenn ja würde ich mich über eine Rückmeldung freuen. Noch ein Wort zum "verbiegen" der Motorplatte: 2020 ist mir durch mein eigenes Verschulden die Motorplatte gerissen:  Zu diesem Zeitpunkt hatte ich kein ABS Filament vorrätig. Also schnell mit PETG gedruckt, was soll schon passieren? Und, klar passiert was! Denn jeder ausgeworfene Ball hatte einen leichten Seitendrall. Grund: Die Motorplatte hat sich, durch die federnde Eigenschaft des PETG Filaments, beim Balldurchgang nach aussen verbogen, siehe linke Abbildung: 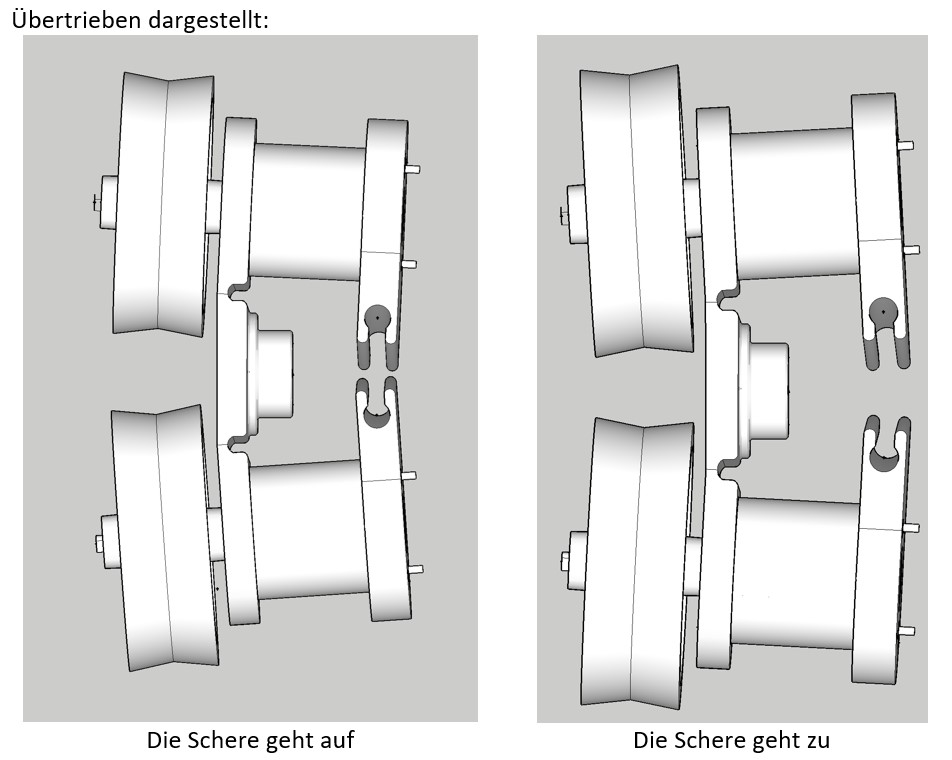 Leider hat das nicht in die andere Richtung funktioniert! Da waren die Hebelkräfte so groß, dass etwas anderes nachgegeben hat, ich vermute die 10mm dicke Motorwelle? Auch eine Verringerung der Quetschung des Balles beim Durchgang, brachte keine signifikante Besserung. Schade, wäre einfach umzusetzen gewesen. Aber, wenn das so einfach gegangen wäre, hätte das sicher schon jemand vermarktet. |
|
Dezember 2023 Endlich fertig, hat länger gedauert als vorgesehen, warum und wieso kannst du hier nachlesen |
DIY einfach und günstig zu bauende Tennis oder Pickleball BallmaschineYouTube Unten ist die Version mit abgebrochenem Fuß abgebildet  |
Eine wirklich simple Ballmaschine die einfach zu bauen, zu warten und zu bedienen ist und wenn es schnell und günstig gehen soll, einfach die externe Schwenkfunktion erst später hinzufügen |
| Juli 2023 |
Universal SchwenkvorrichtungYouTube |
Nicht nur für eine Tennis Ball Maschine, die Vorrichtung
kann für jeden Zweck des hin und her schwenkens verwendet werden |
| Juni 2023 |
Wie sieht die Bedienoberfläche aus Was kann meine Ballmaschine Wie fühlt sich die neue Funktion an YouTube  |
Update vom 26.08.2023: Nach mehreren Tests hat sich gezeigt, dass die eingestellte Toleranz, die für alle Funktionen gleichermaßen gilt, nicht optimal ist. Besser wäre eine für jede Funktion separate Toleranz Einstellung. Die neue Funktion 'zulässige Toleranz' fordert wohlüberlegte Einstellungen damit der Ball erreichbar bleibt. Aber sie bringt wirklich Abwechslung ins Spiel. Mein Fazit: Meiner Meinung nach ist die neue Funktion für die dynamischen Challenges in denen Spielzüge simuliert werden, weniger geeignet. Für die statischen Voreinstellungen, ist sie eine Bereicherung. Und solche programmierbare Funktionen lassen sich die Hersteller unverschämt gut bezahlen und begrenzen trotzdem noch den Speicherplatz. Dafür lohnt sich der Eigenbau, auch wenn dieser mit ca 1500 Euro das Budget kräftig belastet. Eine umfangreiche Teileliste findest du auf meiner Downloadseite bei der Version vom Mai 2023 |
| Mai 2023 |
Grosses Upgrade YouTube  |
Ein Video zur Bedienung meiner Ballmaschine und individuellen Programmierung der Challenges, findest du hier |
| April 2023 |
Neuer platz- und gewichtssparender Schwenkmechanismus mit
Kreuzgewinde YouTube  |
Mit dieser
Kreuzgewindespindel
- Schwenkfunktion experimentiere ich schon längere Zeit. Deshalb wollte
ich unbedingt wissen ob das für's mechanische Schwenken zu gebrauchen ist.
Und ja, das müsste funktionieren und benötigt auch weniger Platz und ist
leichter als die Mechanik vom Juni 22 Update vom 28.5.2023: Funktioniert in der Maschine leider nicht! Das Schiffchen bricht schon bei mittlerer Einstellung. |
|
März 2023 Zurück zum Softwareschwenken |
Die
Maschine war einfach zu schwer, also zurück zum neu programmierten
Softwareschwenken und einer neuen Funktion die für mehr Abwechslung
sorgt: 'zulässige Abweichung/Toleranz' YouTube 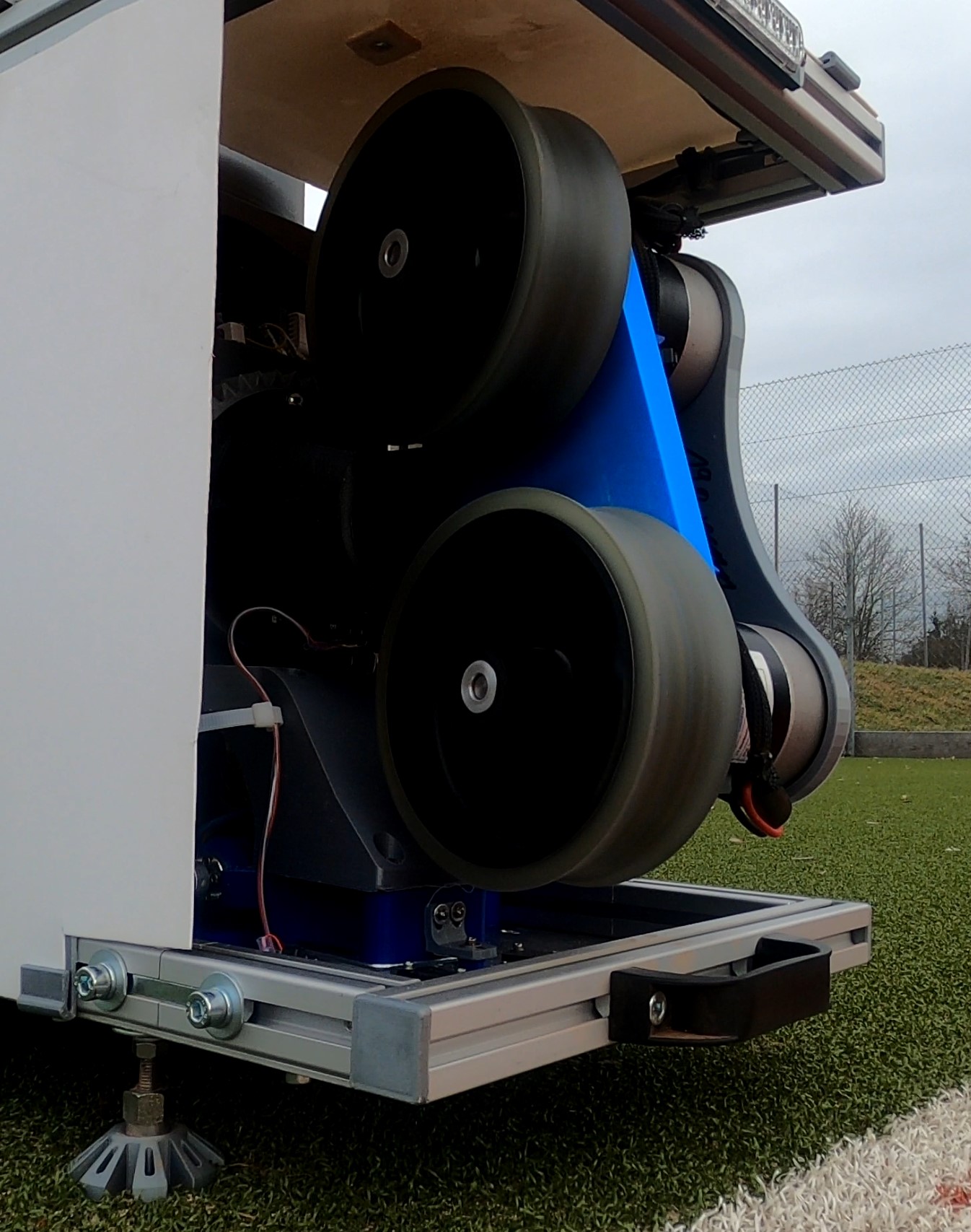 |
Neue Funktion: 'zulässige Abweichung/Toleranz' erklärt:Ein Mitdenker: Artur Brauer hatte folgende Idee, danke dafür:' - nur so als Frage: wäre es nicht wünschenswert auch mehr, bzw. an anderen Stellen im Schwenk Bälle zu haben?' Meine Interpretation und Umsetzung seiner Idee ist nun, eine zuvor festgelegte und einstellbare zusätzliche Streuung des Balles. Und ja, das könnte noch mehr Abwechslung ins Training bringen. Der Ball wird nämlich unvorhersehbar: schneller, langsamer; länger, kürzer; höher, flacher... aber ist bei passender Abstimmung und Einsatz, gut erreichbar. |
|
Juni 2022 Zurück zum mechanischen Schwenken |
Zurück zum mechanischen
Schwenken YouTube  |
Beim Schwenken werden die Ecken ab jetzt, durch eine zuverlässige hardwareseitige Callback Funktion ausgelöst, ich muss softwareseitig nur noch auf dieses Ereignis reagieren. Die Schwenkweite wird mechanisch eingestellt und durch die Verwendung einer zweigängigen TR8-Spindel, wird der einzustellende Sollwert auch zügig erreicht. Der Nachteil: Die Maschine ist schwerer geworden. Das Aus- und Einladen der Maschine hat sich von ehemals einfaches 'heben', auf 'stemmen und wuchten' geändert. Das kann so nicht bleiben. |
|
Februar 2022 Fernsteuerung mit dem MQTT Protokoll |
Raspberry Pi Zero W, TFT Display und Hardwaretasten zur Navigation im
Programm YouTube Link  |
Die
beiden Raspi's kommunizieren mit dem
MQTT-Protokoll. Leider hat sich die Fernsteuerung in der Praxis nicht bewährt. Einfach kurz die wenig handliche Fernsteuerung in die Hand nehmen, Einstellungen vornehmen und starten, geht leider nicht so schnell wie erwartet. Ich verwende wieder ein Full - HD - Touch - Display das mit einem HDMI - Kabel mit dem Raspi verbunden ist oder das Laptop und zum Starten und Stoppen der Maschine, einen kleinen 433 Mhz Funksender und Empf nger.  |
|
September 2021 Der Umbau von Software- auf Mechanisches-Schwenken war erfolgreich |
DIY Tennis ball machine back to mechanicsYouTube Link  |
Zurück zur Mechanik. Der IR Sensor TCRT5000 im Ballauslauf war leider ein Fehlgriff. Der Sensor hat im Sonnenlicht nicht mehr unterbrochen. Oktober 2021 Die Trainings (= beliebig viele gespeicherte Voreinstellungen aneinander gefügt) die mit unterschiedlichen Streu-Winkeln arbeiten, damit meine ich ein Ball in die kurze Ecke, der nächste in die lange Ecke und einen Stop ins ganz kurze Eck, funktionieren leider nicht mehr. Die Verstellung ist zu langsam, die Winkelziele werden nicht mehr erreicht und spätestens der lange Ball geht ins Seitenaus. Eine schnellere Verstellung kann mit einer zweigängigen Trapezspindel erreicht werden. Oder die komplette Mechanik wird durch Software ersetzt. ACHTUNG: Der Auswurfpunkt, das ist der Moment in der die Räder den Ball greifen, muss genau über dem Schwenkdrehpunkt stehen. Das ist bei dieser Konstruktion nicht der Fall! |
|
August 2021 Zurück zur Mechanik |
Versuchsaufbau zum platzsparenden Schwenkenhttps://youtu.be/SZS0pJSJn2U |
Kompakt
angeordnet. |
|
Mai 2021: Kleines Upgrade der Ballmaschine |
Kleinere Verbesserungen und Änderungen an der Ballmaschinehttps://youtu.be/GMD7cyRAYsk |
Kurzfilm
zum Upgrade Wenn du keine dynamische Funktionen, Drills benötigst, sondern nur Drall, Flughöhe, Auswurfperiode und Streuwinkel vorgeben willst, ist keine Computersteuerung nötig. Siehe Modell Version 4. |
|
Februar 2021 |
Schwenkvorrichtung auf Softwaresteuerung umgebauthttps://youtu.be/pQ-WjYNzVD4 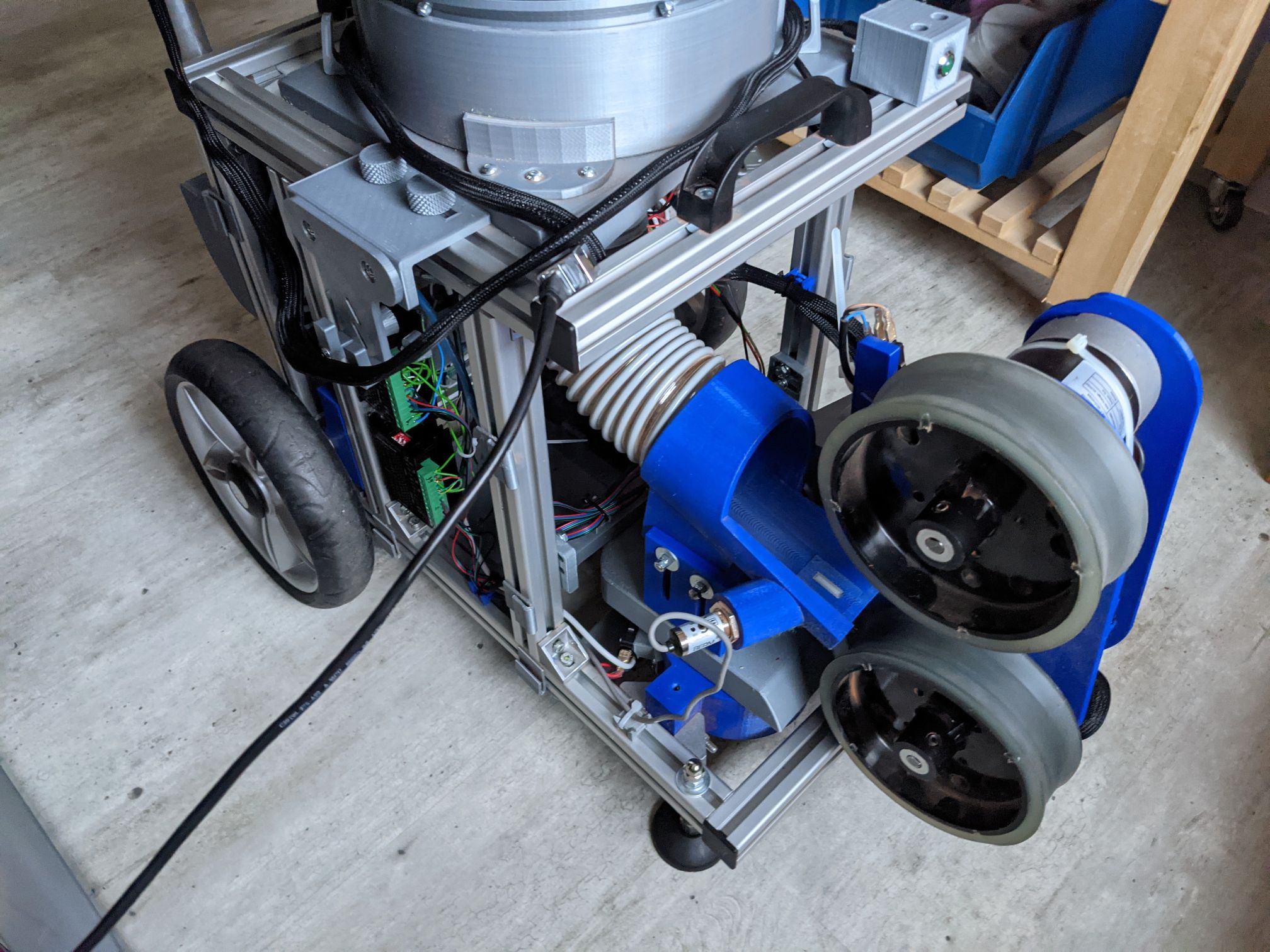 |
Kurzfilm
zum Umbau der Schwenkverstellung auf Softwaresteuerung |
Probleme, Verbesserungen, Änderungen mit der Python gesteuerten Ballmaschinehttps://youtu.be/lekMOsQiPz4  |
Kurzfilm
zu Sensorproblematik und andere Letzte Änderungen: Dezember 2020:
|
|
Ballmaschine mit dem Raspberry Pi4 komplett Software genauer, Python gesteuerthttps://youtu.be/2cFKLUSt9rQ  |
Spielabläufe, Drills wie Stop, Lob, Lang sind jetzt kein Problem mehr. Das Zusammenstellen der Drills ist zwar keine Sekundensache; aber einmal gemacht, ist das Abrufen mit einem Mausklick oder Fingerdruck auch auf dem kleinen Display erledigt. Gespeichert werden kann jede Einstellung. Und jede Einstellung kann beliebig oft mit einer beliebigen anderen zu einem Spielablauf/Drill kombiniert werden. |
|
DIY Ballmaschine Version 4vollelektrisch, leicht und pr zise YouTube: |
Meine
Anforderungen an Handlichkeit und Spielfähigkeit werden mit dieser
Maschine fast erfüllt. Was fehlt ist ein Trainingablauf/Drill mit
unterschiedlichen Schlägen in Länge, Höhe, Frequenz und Spin. Ab hier verwende ich 30x30 mm Aluprofile anstelle von 40x40 mm wie beim Vorgänger. Sollte ich noch mal eine komplett neue Maschine bauen, verwende ich 20x20 mm Aluprofil. Übrigens, wenn Sie auf einen Lob verzichten können und die Ballhöhe durch kippen der Maschine (zum Beispiel über einen in der Höhe verstellbaren Standfuß ) einstellen, können Sie noch mal einiges an Teilen und damit Arbeit und Geld sparen. Das machen die günstigen Maschinen in der 800 Euro Klasse auch so. |
|
NEUE VERSION 3, viele Teile aus dem 3D Drucker:https://www.youtube.com/watch?v=-djV2D-A4aA  |
Das funktioniert schon recht gut. Schwenken auf +- 50 cm genau, Lob, Stop,
Drive, Slice ins kurze oder lange Eck. Leider auch ein paar Nachteile: Zum Beispiel schwer, die erwähnten 21 kg waren geschätzt, tatsächlich sind es 32 kg. Zu groß, die Maschine muss für den Transport teilzerlegt werden. Und die Verstellung der Ballhöhe war platzverschwenderisch, mit Bowdenzügen und großer Kurbel gelöst. Die beiden Bowdenzüge sind auf dem Foto gut zu sehen. |
|
Ballmaschine Karoeinfach die 1. Versionhttps://youtu.be/aKta9h_n5nQ 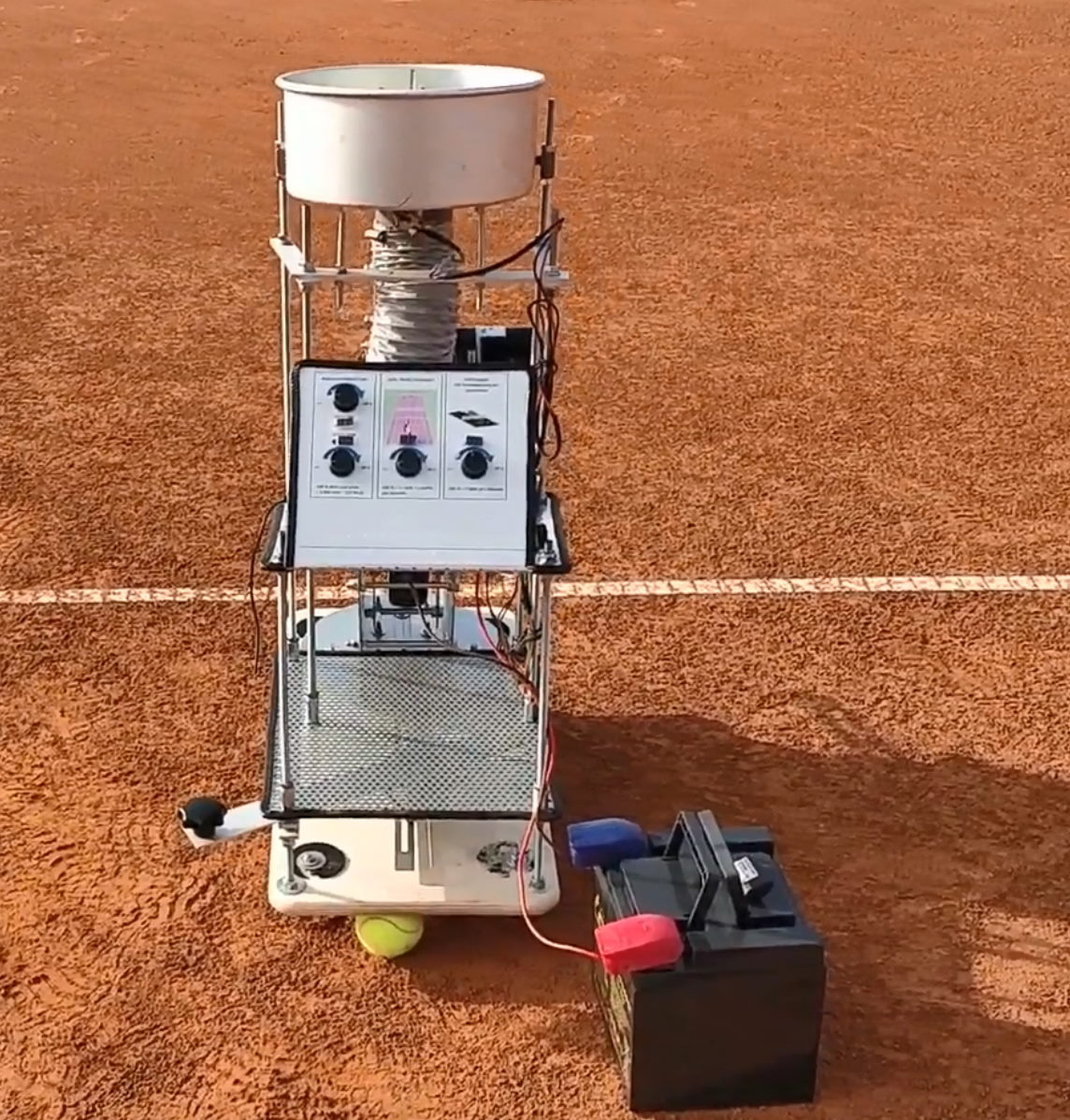 |
Leider nicht zu gebrauchen Die 150 Watt Scooter - Motoren drehen bei 100% PWM mit 3000 Umdrehungen/Minute, der Ball erreicht damit nicht mal die T-Linie! Der Lärm dabei ist ohrenbetäubend weil, die Unwucht der Räder die ganze Maschine zum fibrieren bringt und dabei alles kräftig scheppert und klappert |
|
|
Download der beschreibenden Dateien und einer ausf hrlichen
Anleitung:
Genaue Anleitung.pdf Inhaltsverzeichnis:
Die Dokumente können Sie hier herunterladen: garage.zip ~ 4 MB |
Garagentor mit dem HandyÖffnen und schließenDie Garagenkontrolle mit Bewegtbild, Aufzeichnung bei Bewegungserkennung und Fernsteuerung des Garagentores von jedem Browser im LAN aus abrufbar. Grundlage ist die freie und geniale Software RPi-Cam-Web-Interface f r den Raspberry Pi. https://youtu.be/-wiR8hRwrzs  |
Sie brauchen:
Raspberry Pi, RPI
Cam Web-Software,
Schaltrelais,
Kabel
und etwas bastelarbeit. Die Umsetzung erfordert etwas Wissen im Umgang mit dem Raspberry Pi. Wenn Sie diese Voraussetzung nicht mitbringt, gibt es für Sie zur Unterstützung im zip Archiv eine ausführliche Anleitung (Genaue Anleitung.pdf). Noch ein wichtiger Hinweis: Vergewissern Sie sich wann das verwendete Relais schaltet. Manche schalten bei '0 (False)' durch; und andere bei '1 (True)'. Danach müssen Sie das Python Script 'garage.py' in einem normalen Texteditoröffen und wie unten gezeigt anpassen:  |